
Bugbot
 email
email This page
This page in English
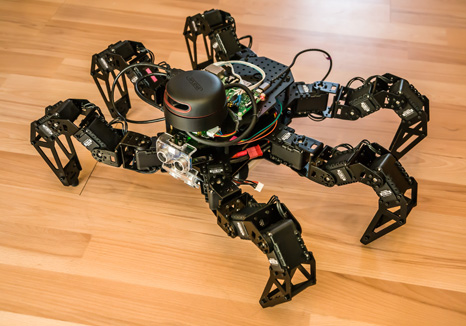
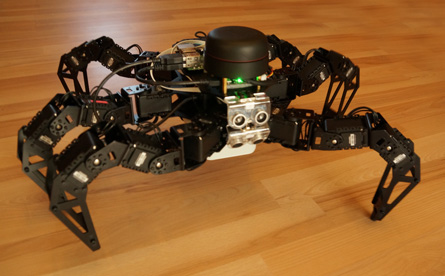
Bugbot ist ein autonomer, mobiler Roboter und bietet eine Plattform zur Entwicklung von Verfahren und Algorithmen zur autonomen Robotik. Bugbot ist ein Hexpode, ähnlich einem Insekt. Die Entwicklung des Bugbots (an der Fakultät Informatik, TH Nürnberg) geht bis in das Jahr 2017 zurück. Ziel war es, eine Hardware, mechanische Plattform und Software-Plattform zur Verfügung zu stellen, mit der grundlegende Verfahren der mobilen Robotik untersucht werden können. Im Gegensatz zu fahrenden Robotern entstehen bei gehenden Robotern besonderen Herausforderungen, beispielsweise auf dem Gebiet der Gangarten. Wegen des Insekten-artiken Aussehens bekam er den Namen Bugbot. Er wiegt 3,1 kg, nimmt eine Grundfläche von 40 cm x 40 cm ein und hat eine Höhe von 24 cm. Er verfügt über 18 Servo-Motoren. 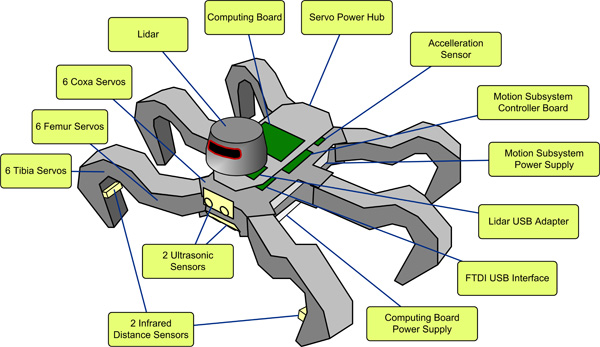
Bugbot ist in der Lage, Bewegungskommandos mit verschiedenen Gangarten auszuführen. Er besitzt eine Hindernis-Nah-Erkennung (Infrarot und Ultraschall). Ein 360°-Laser-Scanner misst die Entfernung zu Objekten bis zu 6 m mit cm-Genauigkeit. Damit kann er eine Karte der Umgebung aufbauen. Komponenten zur Navigation und Bewegungsplanung erlauben es, Ziele auf möglichst kurzem Weg über effiziente Bewegungen anzugehen. 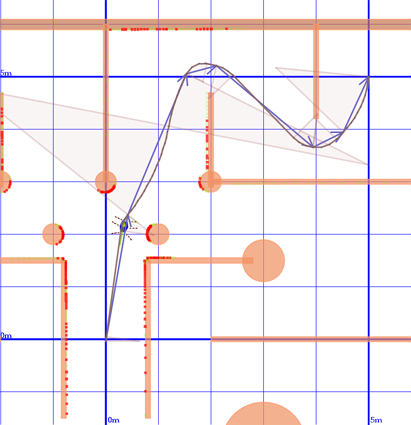
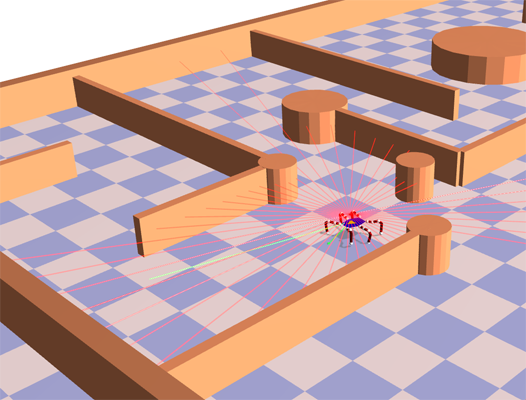
Neben dem eigentlichen Roboter gibt es für die Entwicklung und Tests eine Simulationsumgebung. Diese soll die Realisierung von Steuerprogrammen für den Bugbot erleichtern, da man einen Testlauf sofort am PC ausführen kann. Darüber hinaus kann man beliebige virtuelle Umgebungen einrichten, die in der realen Welt sehr viel Aufwand kosten würden. Die Simulation ist so exakt, dass das Steuerprogramm keinen Unterschied wahrnimmt. 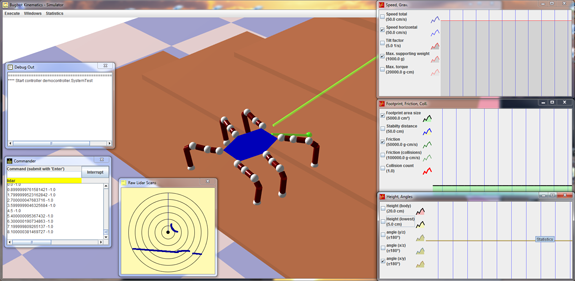
Videos |