
Bugbot
 email
email This page
This page in German
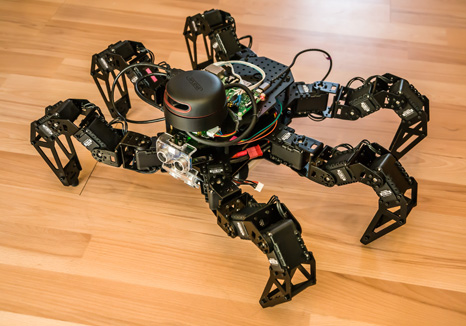
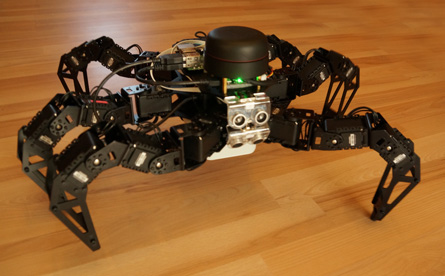
Bugbot is an autonomous, mobile robot and provides a platform for developments of methods and algorithms in the area of autonomous robotic. Bugbot is an insect-like hexapod. The Bugbot was developed at the Nuremberg Institute of Technology, Computer Science Faculty. Its history goes back to 2017. The major goal was to provide hardware, mechanical construction and software environment, to investigate fundamentals of mobile robotic problems. In contrast to wheeled robots, we have additional challenges, e.g., related to gaits. Due to its insect-like shape, it gets the name Bugbot. It has a weight of 3.1 kg and covers an area of 40 cm x 40 cm. Its height is 24 cm. It has 18 servos. 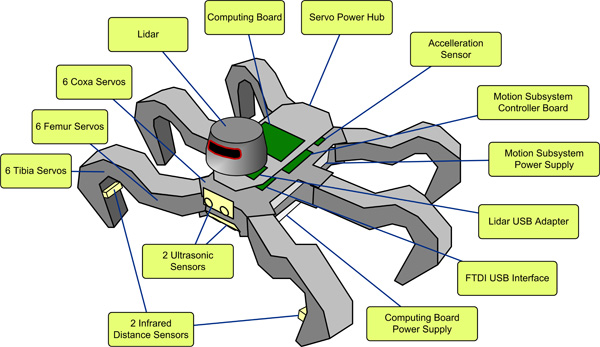
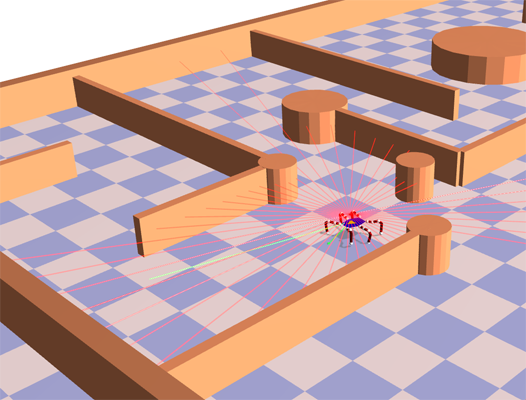
Bugbot can execute walking commands with different gaits. It is able to detect nearby obstacles in walking direction with ultrasound and infrared sensors. A 360° Laser range scanner can detect obstacles in a range up to 6 m with cm resolution. With these sensors Bugbot can build a map of the environment. Navigation and trajectory components are able to plan paths and walking commands to get to targets with minimal effort. 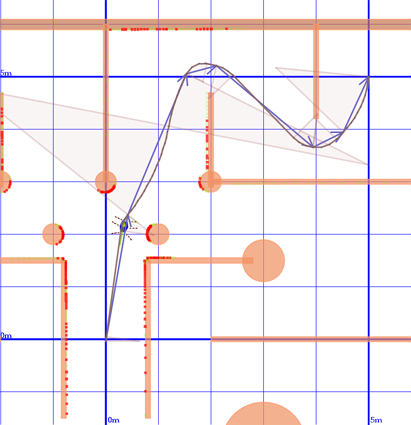
Besides the actual robot, there exists a simulation environment for development and testing software components. The major goal: the generation of robot control programs can significantly be simplified, as many tests can be performed on a desktop computer. Inside the simulator, arbitrary artificial environments can be constructed that would cause significant costs in reality. The simulation is very close to reality; in particular, control programs can be shifted from simulator to real robot without any modification. 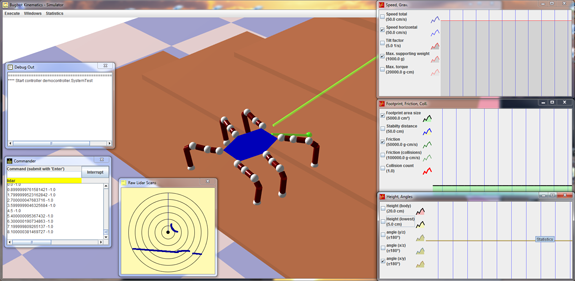
Videos |